Bryła sztywna (np. kula, walec, obręcz) obok ruchu postępowego może wykonywać dodatkowy ruch obrotowy wokół własnej osi. Wówczas mamy do czynienia z toczeniem się ciała.
W przypadku ruchu postępowego prędkości wszystkich punktów bryły poruszają się z tą samą prędkością (vpost).
Rys. 1. Prędkości punktów bryły sztywnej w ruchu postępowym.
W przypadku ruchu obrotowego prędkości (vobr.) różnych punktów mogą przyjmować różne wartości i kierunki. W szczególności punkt, który znajduje się na osi obrotu ma prędkość równą zero.
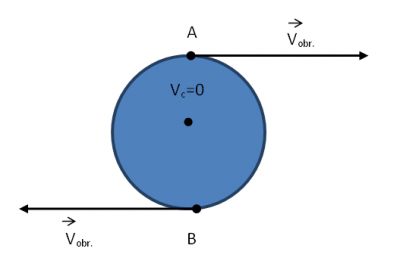
Rys. 2. Prędkości punktów bryły sztywnej w ruchu obrotowym.
Po złożeniu tych dwóch ruchów otrzymamy następujący rozkład prędkości.

Rys. 3. Prędkości punktów bryły sztywnej w przypadku toczenia.
Jak wynika z ostatniego rysunku prędkość punktu A (vA) jest sumą prędkości w ruchu postępowym i obrotowym:
\(v _{A} =v _{post.} +v _{obr.} \)
Prędkość w ruchu obrotowym można wyrazić następująco:
\(v _{obr.} = \omega \cdot r\)
gdzie: ω – prędkość kątowa, R – promień bryły
Stąd:
\(v _{A} = v_{post.} + \omega \cdot r\)
Ponieważ \( \omega = \frac{v _{post.} }{R} \) , to:
\(v _{A} =v _{post.} + \frac{v _{post.}}{R} R=2v _{post.} \)
W przypadku punktu B wypadkowa prędkość jest równa zero, gdyż jest ona różnicą prędkości ruchu postępowego i obrotowego:
\(v _{B} =v _{post.} -v _{obr.} =v _{post.}-v _{post.}=0\)
Punkt C nie wykonuje ruchu obrotowego, stąd jego wypadkowa prędkość jest równa prędkości w ruchu postępowym:
\(v _{C} =v _{post.} \)
Zgodnie z pierwszą zasadą dynamiki, aby bryła mogła się toczyć ruchem jednostajnym, siła wprawiająca bryłę w ruch musi być równa co do wartości sile oporu, tzw. sile tarcia tocznego (T), która wyraża się następującym wzorem:
\(T=f _{T} \frac{F _{N} }{R} \)
gdzie: fT – współczynnik tarcia tocznego (jednostką jest wymiar długości czyli metr), FN – siła nacisku bryły na podłoże.
Z ostatniego wzoru widać, że wzrost promienia toczącego się ciała powoduje zmniejszenie siły tarcia, więc łatwiej jest toczyć ciała o dużym promieniu.
Współczynnik tarcia tocznego jest w większości przypadków mniejszy od współczynnika tarcia w ruchu posuwistym, stąd wynalazek koła jest jednym z najważniejszych w historii ludzkości.