Moment siły jest wektorową wielkością fizyczną równą iloczynowi wektorów ramienia siły i siły. Ramię siły jest wektorem łączącym punkt przez który przechodzi oś obrotu bryły z punktem do którego przyczepiona jest siła.
\( \vec{M} = \vec{r} \times \vec{F} \)
gdzie: \( \vec{r} \) - ramię siły, \( \vec{F} \) - siła.
Kierunek wektora momentu siły jest zawsze prostopadły do płaszczyzny wyznaczonej przez wektory \( \vec{r} \) i \( \vec{F} \).

Aby iloczyn wektorowy występujący w powyższym wzorze zastąpić zwykłym iloczynem, należy wartości wektorów ramienia siły i siły pomnożyć przez sinus kąta \( \alpha \) pomiędzy nimi:
\(M=r \cdot F \cdot sin \alpha \)
Jak wynika z równania jednostką momentu siły jest niutonometr – 1N•m.
Moment siły odgrywa bardzo podobną rolę w ruchu obrotowym bryły sztywnej co siła w ruchu postępowym, zmienia bowiem moment pędu (zmienia prędkość kątową bryły), podobnie jak działanie siły zmienia pęd (zmienia prędkość ciała).
Moment siły - przykład.
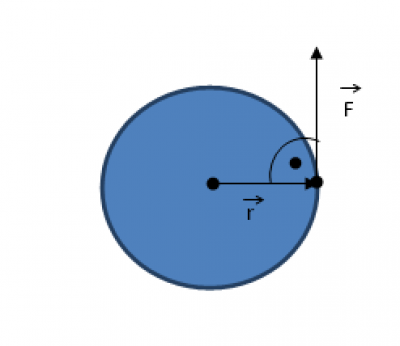
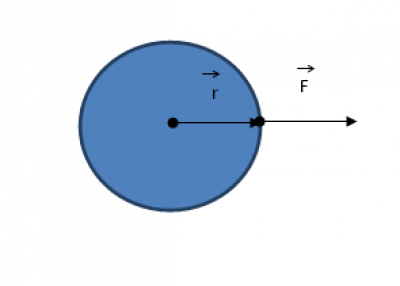
Znajdź moment siły działający na bryłę w sytuacjach przedstawionych na poniższych rysunkach. Załóż, że r = 1m i F = 2N.
a)
b)
c)

a) ponieważ kąt pomiędzy wektorami \( \vec{r} \) i \( \vec{F} \) jest równy 90° , to \(sin \alpha =1\) więc:
M = r • F = 1m • 2N = 2 N•m
b) ponieważ kąt pomiędzy wektorami \( \vec{r} \) i \( \vec{F} \) jest równy 0° , \(sin \alpha =0\), więc:
M = 0
Tak skierowana siła nie może nadać ciału ruchu obrotowego.
c) ponieważ kąt pomiędzy wektorami \( \vec{r} \) i \( \vec{F} \) jest równy 30° , to \(sin \alpha =0,5\), więc:
M = 0,5 r • F = 1 N • m
Tak skierowana siła będzie przyczyną ruchu obrotowego bryły, jednak skutek jej działania będzie mniejszy niż w przypadku a).